このページについて
利用 
ALNavigationのAPIによって、ロボットに安全な移動をさせることができます。
NAO
NAOはまだ障害物を避けることはできませんが、用心深く移動することができます。
障害物がNAOの警戒領域に入ったらすぐに停止します。
Pepperのみ
Pepperは様々なモードでALNavigationを使うこともできます。
NAO
NAOはまだ障害物を避けることはできませんが、用心深く移動することができます。
障害物がNAOの警戒領域に入ったらすぐに停止します。
Pepperのみ
Pepperは様々なモードでALNavigationを使うこともできます。
- ALNavigationProxy::navigateToを使うことで、障害物を避けることができます。
- ALNavigationProxy::moveAlongを使うことで、安全な軌道で実行させられます。
- ALNavigationProxy::findFreeZoneは自由な空間です。(例えば、ショーを見せるときに利用できます)
- 知らない環境の探索と局在化ができます。
方法
障害物の回避
Pepperのみ
移動しているとき、Pepperは全てのセンサーを使って、下の図のような方向に動くことによって障害物を検出しようとします。
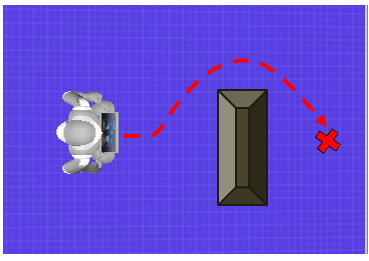
移動しているとき、Pepperは全てのセンサーを使って、下の図のような方向に動くことによって障害物を検出しようとします。
安全マップ
Pepperのみ
安全マップは、動きの安全性、局地的なナビゲーション、自由な空間のAPIなどのために使われます。
このマップは、3Dカメラやレイザー、ソナーなどの補助できる全てのセンサーから受け取ったデータを合わせることで作られています。
隠れている障害物は、たとえそれ以上その障害物が直接見えなくとも、メモリーに残ります。
この長期のメモリーは障害物を最大15秒保持し続けます。
安全マップは、動きの安全性、局地的なナビゲーション、自由な空間のAPIなどのために使われます。
このマップは、3Dカメラやレイザー、ソナーなどの補助できる全てのセンサーから受け取ったデータを合わせることで作られています。
隠れている障害物は、たとえそれ以上その障害物が直接見えなくとも、メモリーに残ります。
この長期のメモリーは障害物を最大15秒保持し続けます。
探索と局在化
Pepperのみ
Pepperは以下のことができます。
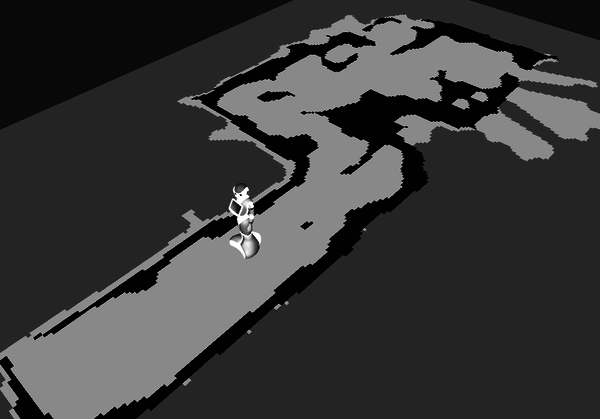
自身を局在化させる行為と知らない環境のマップを作る行為を同時に行うプロセスはSLAMというものとして知られています。
SLAMを実行するために、探索の間、Pepperはオドメトリとレイザーセンサーを使います。
一度、Pepperが探索を始めると、そのマップは二次元の画像として取得されます。
Pepperは以下のことができます。
- 知らない環境を自動的に探索することができます。
- その環境のマップを作ることができます。
- 自分を局在化させて、そのマップ上で誘導することができます。
自身を局在化させる行為と知らない環境のマップを作る行為を同時に行うプロセスはSLAMというものとして知られています。
SLAMを実行するために、探索の間、Pepperはオドメトリとレイザーセンサーを使います。
一度、Pepperが探索を始めると、そのマップは二次元の画像として取得されます。