このページについて
NAOqi Audio - 概要 | API | Advanced
See also
| Control | Stiffness?, Joint?, Locomotion?, Cartesian?, Whole body?. |
| Reflexes | Self-collision avoidance?, External-collision avoidance?, Fall manager?, Smart Stiffness Diagnosis effect?, Push Recovery?, Slope compensation?. |
| Idle | Idle?. |
| Tools | General tools?, Motion task?. |
利用 
ALMotionは、ロボットを動かすのを容易にする方法を提供します。
制御
反射
ALMotionはSelf-collision avoidance?, External-collision avoidance?, Fall manager?, Smart Stiffness? , Diagnosis effect?のような反射も含みます。
反射は、デフォルトで有効になり、ロボットの動作を変更します。
より具体的には以下のようになります:
上級ユーザーは反射の全部、または一部を無効にする必要があるかもしれません。さらに詳細についてはこちらをご覧ください。Deactivation of non-critical safety reflexes?
反射は、デフォルトで有効になり、ロボットの動作を変更します。
より具体的には以下のようになります:
- 自分や外部との衝突を避けるために動作を変更します。 (参考 Self-collision avoidance?, External-collision avoidance?)
- ロボットが動いていない時に余裕を持って剛性を調整します。 (参考 Smart Stiffness?),
- 落下を検知した時(参考 Fall manager?)や、潜在的に危険なデバイスで問題またはエラーが発生した場合(参考 reflexes-diagnosis?)、特定のタスクのトリガーとなります。
上級ユーザーは反射の全部、または一部を無効にする必要があるかもしれません。さらに詳細についてはこちらをご覧ください。Deactivation of non-critical safety reflexes?
Idle
Tools
動作
ALMotionは50Hz(サイクル20ms)で動作します。
ALMotionでは、パブリックメソッドを呼び出してモーションを要求するたびに、そのモーションを処理するためのモーションタスクが作成されます。これらのタスクの管理方法については、Motion task?を参照してください。
ALMotionでは、パブリックメソッドを呼び出してモーションを要求するたびに、そのモーションを処理するためのモーションタスクが作成されます。これらのタスクの管理方法については、Motion task?を参照してください。
パフォーマンスと制限
パフォーマンス
ALMotionはコアモジュールです。リフレクションを管理し、サイクルごとにモデルを更新するのでモジュールは一定のCPUを消費します。この消費は、歩くなどの特別な作業の間に増加する可能性があります。
以下のテーブルはALMotion CPUの消費率についての手がかりとなります。
ALMotionはコアモジュールです。リフレクションを管理し、サイクルごとにモデルを更新するのでモジュールは一定のCPUを消費します。この消費は、歩くなどの特別な作業の間に増加する可能性があります。
以下のテーブルはALMotion CPUの消費率についての手がかりとなります。
| Task \ Processor | Atom (NAO V4) |
| update Model | 3% |
| walking | 10.8% |
Pepperの特徴への適応
"NAO"と"Pepper"両方に対して、独特のMotionAPIを維持しようと努めてきました。
しかしいくつかの適応が必要でした。
しかしいくつかの適応が必要でした。
| Group | Main adaptations | For further details, see ... |
| Stiffness | Manual Stiffness control is forbidden for Pepper‘s lower part. | Stiffness control? |
| Locomotion control | Specific stability constraints on the leg.Locomotion methods are prohibited if power hatch? is open. | Locomotion control? |
| Cartesian control | Most of the methods are unusable. | Cartesian control? |
| Whole Body control | Do not use any Whole Body control methods. | Whole Body control? |
| Safety reflexes | A specific safety reflex is dedicated. | Push Recovery? |
| A specific safety reflex is dedicated. | Slope compensation? | |
| Frontal security distance is correlated with speed. | External-collision avoidance? | |
| Hardware issues trigger specific Rest reflexes?. | Diagnosis effect? |
取り掛かるには
以下はALMotionを使うための重要な情報です
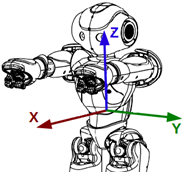
軸の定義
ロボットの正面方向がX軸正の方向であり、右から左がY軸の方向であり、垂直方向がZ軸です。
国際単位系
ALMotion モジュールは国際単位系(メートル、秒、ラジアンなど)を用いてます。
関節や体の部位の名前をどう定義するか
上級者へ
自分で最初からモーションをつくる
ALMotionの定義に精通していて、新しい反射などの高度な動作をC ++でさらに作成したい場合は、より良いオブジェクトトラッカー、または同時にDCMモジュールとALMotionを使用します。こちらをご覧ください:Motion - advanced?
非クリティカルセーフティ反射の無効化
非常に重大な反射の無効化は、通常の使用では許可されません。
重要でない反射を無効にするには、関連するsetNameOfReflexEnabledメソッドを使用します。
以下のリストは、反射の無効化が重要かどうかを示しています。
重要でない反射を無効にするには、関連するsetNameOfReflexEnabledメソッドを使用します。
以下のリストは、反射の無効化が重要かどうかを示しています。
| Method | NAO | Pepper |
| ALMotionProxy::setCollisionProtlectionEnabled? | OK | OK |
| ALMotionProxy::setDiagnosisEffectEnabled? | OK | OK |
| ALMotionProxy::setSmartStiffnessEnabled? | OK | OK |
| ALMotionProxy::setExternalCollisionProtectionEnabled? | OK | Critical, Arms excepted |
| ALMotionProxy::setFallManagerEnabled? | Critical | Critical |
| ALMotionProxy::setPushRecoveryEnabled? | NA | Critical |